|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCYCLOPEDIA VỀ ĐIỆN TỬ TRUYỀN THANH VÀ KỸ THUẬT ĐIỆN Thiết bị giám sát từ xa sức khỏe của cảm biến áp điện
Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện / Thiết bị bảo mật và tín hiệu đối tượng Sự nguy hiểm do hậu quả của một tai nạn khiến cần phải đặt ra các yêu cầu ngày càng cao về độ tin cậy của kênh đo và trên hết là cảm biến, vì nó được vận hành trong những điều kiện khó khăn nhất hiện có tại cơ sở này. Cần phải kiểm soát các thuộc tính của nó như một phương tiện đo lường thường xuyên hơn so với việc xác minh định kỳ (thường là một lần một năm). Vì cảm biến thường được lắp đặt ở nơi khó tiếp cận (ví dụ: dưới vỏ của thiết bị), nên việc điều khiển phải được thực hiện từ xa. Phương pháp điều khiển [1], được thực hiện trong thiết bị được mô tả và khả thi, dựa trên thực tế là bộ chuyển đổi áp điện của cảm biến có thể đảo ngược, nó tạo ra tín hiệu điện khi nó được tác động cơ học và bị biến dạng cơ học khi có điện điện áp được áp dụng. Trong cả hai trường hợp, mức độ phản ứng với tác động được xác định bởi cùng một hệ số, được gọi là piezo-modulus. Quán tính của cảm biến với tư cách là một hệ thống cơ học được xác định bởi tần số của dao động tự do của nó, điều này phụ thuộc chủ yếu vào các đặc tính của chính cảm biến, nhưng cũng phụ thuộc vào các đặc tính cơ học của phần vật thể tiếp xúc với cảm biến. Nó được gọi là tần số của cộng hưởng cài đặt (UR). Quán tính điện không liên quan đến quán tính cơ học và được xác định gần đúng đầu tiên bằng tích của điện dung của cảm biến với cáp và điện trở hoạt động của tải của nó. Phổ tần số của rung động được đo bởi cảm biến luôn nằm dưới tần số của SD (nếu không kết quả đo sẽ không đáng tin cậy), chiếm diện tích từ 0,2 đến 0,3 ... XNUMX giá trị của nó. Để kết nối với thiết bị điều khiển được mô tả, cảm biến được ngắt kết nối khỏi thiết bị mà nó hoạt động. Một hiệu điện thế không đổi được đặt vào nó, tích điện cho điện dung của nó và làm biến dạng phần tử áp điện. Khoảng thời gian của hoạt động này phải sao cho tất cả các quá trình cơ và điện tạm thời có thời gian kết thúc. Sau đó, nguồn điện áp được ngắt khỏi cảm biến và một điện trở hoạt động nhỏ được kết nối với các cực của thiết bị sau trong một thời gian (thường là vài chục micro giây) đủ để xả gần như hoàn toàn điện dung của cảm biến. Biến dạng cơ học của phần tử áp điện không thể thay đổi với tốc độ như nhau, khi nó trở về trạng thái ban đầu xảy ra dưới dạng dao động tắt dần với tần số SD. Phần tử áp điện chuyển những dao động này thành tín hiệu điện, ví dụ, được ghi lại bằng một máy hiện sóng lưu trữ. Một dấu hiệu của trạng thái bình thường của cảm biến là sự bất biến của hình dạng và mức độ của tín hiệu trong quá trình theo dõi lặp lại. Các nút chính của thiết bị điều khiển là hai bộ rung đơn, đặt khoảng thời gian của khoảng thời gian đóng và đăng ký, và hai công tắc. Sự kích thích dao động bởi sự phân rã của xung với một khoảng thời gian ổn định của mạch làm cho nó có thể đạt được độ lặp lại tốt của mức và hình dạng của tín hiệu điện, điều này cần thiết cho các hoạt động đo lường. Phiên bản được mô tả của thiết bị có phần phức tạp hơn. Vì máy hiện sóng lưu trữ là một thiết bị đắt tiền và tương đối hiếm, nên quá trình điều khiển được thực hiện theo chu kỳ, do đó có thể sử dụng máy hiện sóng thông thường. Để có độ tin cậy cao hơn trong việc xác định tần số của SD, một bộ lọc được giới thiệu để loại bỏ nhiễu tần số cao. Có một nguồn điện hạ áp tự trị và một đồng hồ đo tần số UR với đèn LED chỉ thị.
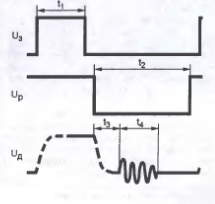
Sơ đồ của thiết bị được hiển thị trong hình. 1. Multivibrator trên các phần tử DD1.1 và DD1.2 tạo ra các xung hình chữ nhật. Từ đầu ra của phần tử DD1.2, một xung có thời gian t được đưa đến đầu vào điều khiển của công tắc DA1.3. Trong quá trình hoạt động, điện áp sạc +1 V được cung cấp thông qua một công tắc đóng tới đầu vào của cảm biến được kết nối với đầu nối X14 qua mạch R15R3HL12 (đường cong U3 trong Hình 2).
Điện dung của cảm biến được sạc đến điện áp này. Đèn LED HL3 được thiết kế để báo hiệu ngắn mạch trong mạch cảm biến. Xung nghịch đảo đối với xung được xem xét đến từ đầu ra của phần tử DD1.1 thông qua các mạch phân biệt (C2R6) và tích hợp (C4R11) đến các đầu vào của phần tử DD1.3. Tại đầu ra của nó, một xung mức logic thấp được hình thành, nằm ở khoảng dừng giữa các xung sạc, nhưng có thời gian ngắn hơn t2 so với khoảng thời gian tạm dừng. Thông qua mạch phân biệt C6R18, cạnh giảm của xung này bắt đầu một bộ rung đơn trên bộ định thời DA6, xung trong đó, với khoảng thời gian được xác định bởi các thông số của mạch R21C7 (khoảng t3 trong Hình 2), được cấp cho điều khiển đầu vào của công tắc thấp hơn (theo mạch) của vi mạch DA2. Trong trường hợp này, đầu ra cảm biến (chân 3 của đầu nối X1) được kết nối với một dây chung thông qua công tắc và điện trở R12, xả điện dung của cảm biến. Điện áp trên cảm biến (đường cong U trong Hình 2) giảm xuống không. Cạnh rơi của xung bộ định thời bắt đầu một bộ rung đơn trên các phần tử DD6.1 và DD6.3, tạo ra một xung có thời gian t4 (được xác định bởi các thông số của mạch C13R31R53) hiện đang dao động trong tự nhiên, thông qua mạch phân biệt C6.2R2 được cấp tới đầu vào của bộ khuếch đại trên op-amp DA5, với đầu ra của nó, thông qua điện trở R16, công tắc SA4 kết nối tụ điện C25 (chế độ "Chỉ báo") hoặc điện trở R3 (chế độ "Chẩn đoán"). Trong trường hợp đầu tiên, một bộ lọc làm mịn được hình thành, trong trường hợp thứ hai - một bộ phân áp độc lập tần số. Tiếp theo, tín hiệu đi đến đầu nối X8, nơi kết nối máy hiện sóng hoặc máy ghi khác. Một xung đồng bộ hóa được đưa ra cùng một đầu nối, trùng thời gian với thời điểm bắt đầu của khoảng thời gian t27. Các nút còn lại của thiết bị tạo thành máy đo tần số UR. Tín hiệu cảm biến với sự hỗ trợ của bộ khuếch đại DA3 và bộ so sánh điện áp DA5 được chuyển đổi thành một chuỗi xung có biên độ tiêu chuẩn. Độ lợi (10 hoặc 20) được chọn bởi công tắc SA2, trạng thái của nó được biểu thị bằng đèn LED HL1 và HL2. Đếm các xung từ đầu ra của bộ so sánh trong 1 ms sẽ cho giá trị tần số của SD tính bằng kilohertz. Tuy nhiên, phương pháp này hóa ra là không thể chấp nhận được, vì các dao động tự nhiên của các cảm biến áp điện hiện đại phân rã nhanh hơn nhiều. Do đó, cần phải đếm các xung trong nhiều khoảng thời gian ngắn hơn với tổng thời gian là 1 ms. Thí nghiệm cho thấy rằng hai khoảng thời gian 500 μs là khá đủ. Tài khoản tiến hành như sau. Sau khi nhấn nút SB2 "Đặt. 0", bộ đếm DD2.1 được đặt ở trạng thái sẵn sàng đếm, được chỉ báo bằng đèn LED "Sẵn sàng" của HL4 và các bộ đếm DD4 và DD5 được đặt thành không. Nhấn và giữ nút SB1 "Start" sẽ mở công tắc DA1.1 và xung đồng hồ từ đầu ra của phần tử DD1.2 đi qua công tắc mở DA1.2 đến bộ đếm DD2.1. Hai đầu vào của tín hiệu phần tử DD3.2 đến từ đầu ra 2 và 4 của bộ đếm, và đầu vào thứ ba của nó - từ đầu ra của phần tử DD6.2. Do đó, mức cao ở đầu ra của phần tử DD3.3 chỉ tồn tại trong các chu kỳ hoạt động sau xung sạc thứ sáu và thứ bảy (tính từ thời điểm nút SB1 được nhấn). Xung thứ tám thiết lập mức cao ở đầu ra 8 của bộ đếm DD2.1, đóng công tắc DA3.1 thông qua biến tần DD1.2. Dòng xung đến đầu vào của bộ đếm DD2.1 dừng lại và đèn LED HL4 sẽ tắt. Bây giờ nút SB1 có thể được giải phóng. Đầu ra của phần tử DD3.3 được kết nối với đầu vào điều khiển của công tắc DA1.4, được kết nối giữa đầu ra của bộ so sánh DA5 và đầu vào của bộ đếm DD4. Dấu hiệu về trạng thái của bộ đếm DD4 và DD5 không hoàn toàn bình thường - sử dụng hai vạch mười ngày của đèn LED HL5-HL24. Điều này được thực hiện để giảm mức tiêu thụ hiện tại: tổng mức tiêu thụ của tất cả các đèn LED này trong mọi trường hợp không vượt quá 8 mA. Thật không may, các màn hình LCD kinh tế hơn cũng không phù hợp do phạm vi nhiệt độ hoạt động không đủ. Điốt VD1-VD3 được giới thiệu để giảm nhiễu xuyên âm. Tất cả các tụ điện trong thiết bị đều bằng gốm, và C7 và C13 phải có TKE nhỏ, chúng có thể khác nhau, ví dụ như mica. Bộ ổn nhiệt (ví dụ, C2-31) cũng phải là điện trở R21 và R31. Công tắc - trượt cỡ nhỏ B1561. Tuy nhiên, thay vì SA3, tốt hơn là sử dụng một nút có chuyển tiếp điểm, ví dụ PS580N. Vị trí của các tiếp điểm khi nhả nút phải khớp với vị trí được chỉ ra trong sơ đồ trong Hình. một. Loại đầu nối X1 phụ thuộc vào cảm biến nào được cho là phải được kiểm tra thường xuyên nhất. Tác giả đã sử dụng phích cắm khối RS-4TV, vì phần lớn các cảm biến rung động công nghiệp trong nước là các máy đo gia tốc áp điện ABC và ANS với các ổ cắm cáp RS-4TV, mục đích của các tiếp điểm tương ứng với được thể hiện trong sơ đồ trong Hình. 1. Do không yêu cầu khả năng chống rung từ kết nối có thể tháo rời trong trường hợp này, nên cẩn thận tháo ren ngoài trên thân phích cắm, điều này sẽ tạo điều kiện thuận lợi và đẩy nhanh quá trình kết nối và ngắt kết nối cảm biến. Cảm biến của các loại khác có thể được kết nối với thiết bị thông qua bộ điều hợp thích hợp. Đầu nối X2 có thể là bất kỳ, ví dụ: ONTS-VG-2-3 / 16-p. Dây tín hiệu trong cáp nối với nó phải được che chắn, dây tín hiệu đồng hồ không cần che chắn.
Thiết bị được cung cấp năng lượng bởi một pin gồm năm đến sáu tế bào điện có kích thước AA, điện áp của pin này được chuyển đổi thành pin ổn định lưỡng cực +/- 12 V bằng cách sử dụng bộ chuyển đổi TMR0522 [2], được kết nối theo mạch điện được hiển thị trong hình. 3. Khi điện áp của pin GB1 là 7,5 V, dòng điện tiêu thụ từ nó lần lượt là 130 và 145 mA ở chế độ "Chẩn đoán" và "Chỉ định". Thiết bị được lắp ráp trên hai bảng, bảng này ở trên bảng kia và được kết nối bằng cáp ruy-băng. Các bộ điều khiển và đèn LED được gắn trên bảng trên cùng và phần còn lại của các phần tử được gắn trên bảng dưới cùng, ngoại trừ các đầu nối nằm trên bảng góc riêng biệt. Cơ thể đã được chọn sẵn sàng. Vì hầu hết các phần tử hoạt động là các cổng logic và op amps mà không cần hiệu chỉnh bên ngoài, việc thiết lập một thiết bị có dây thích hợp không đòi hỏi nhiều nỗ lực. Sau khi đảm bảo rằng bộ đa xung trên các phần tử DD1.1, DD1.2 tạo ra các xung hình chữ nhật đối xứng với tốc độ lặp lại là 30 ± 5 Hz, bạn cần kiểm tra vị trí và hình dạng của các xung ở đầu ra của phần tử DD1.3 .
Trong trường hợp không có máy hiện sóng hai tia, để làm điều này, bạn có thể sử dụng bộ cộng đơn giản nhất, mạch của nó được hiển thị trong Hình. bốn.
Biểu đồ dao động của tín hiệu tại đầu ra của nó sẽ có dạng như trong Hình. 5, trong đó t1 và t2 là các khoảng thời gian giống như trong hình. 2. Chọn điện trở R6 và R11, đảm bảo rằng khoảng thời gian t2 bắt đầu sau 0,3 ... 1 ms sau khi kết thúc xung sạc. Thời lượng của nó phải là 5 ... 10 ms, giá trị chính xác không quan trọng. Xung được tạo ra bởi bộ định thời DA6 phải có khoảng thời gian trong khoảng 20 ... 30 μs. Nhưng thời lượng xung ở đầu ra của phần tử DD6.2 phải được đặt với điện trở cắt R53 bằng 500 μs với độ chính xác lớn nhất có thể. Điều này ảnh hưởng trực tiếp đến sai số đo của tần số SD.
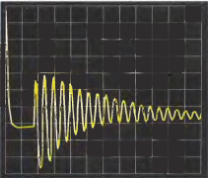
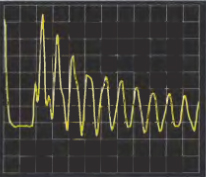
Để điều chỉnh thêm, cần có cảm biến áp điện (gia tốc kế), tốt nhất là có hệ số chuyển đổi theo bậc milivôn trên mét trên giây trên giây và tần số dao động tự do (cao hơn tần số SD) trên 10 kHz. Bằng cách kết nối cảm biến với đầu nối X1, các bộ điều khiển của máy hiện sóng được kết nối với đầu nối X2 đạt được hình ảnh ổn định trên màn hình, tương tự như được hiển thị trong Hình. 6-8. Họ hiển thị các biểu đồ dao động minh họa sự phụ thuộc của tín hiệu vào trạng thái của cảm biến: lỏng lẻo (Hình 6); được cài đặt theo đúng hướng dẫn sử dụng (Hình 7); được lắp đặt, nhưng với việc buộc lỏng lẻo vào cấu trúc được điều khiển (Hình 8). Thang của biểu đồ dao động dọc theo trục tung và trục ngang lần lượt là 50 mV / div. và 50 µs / div. Độ lặp lại của dao động kích thích được đặc trưng bởi kết quả đo vị trí của các điểm đặc trưng của biểu đồ dao động với sự lặp lại gấp mười lần của kích thích. Mức chênh lệch không vượt quá 1,5% và thực tế trùng khớp với sai số của máy hiện sóng lưu trữ S9-8 được sử dụng. Bạn nên đảm bảo rằng không có hiện tượng méo tín hiệu ở đầu ra của op-amp DA3. Trong thực tế, chúng khó xảy ra, phạm vi dao động giảm xóc của các loại cảm biến khác nhau thay đổi một chút và không vượt quá vài trăm milivôn. Khi kiểm tra hoạt động của trình kích hoạt Schmitt trên bộ so sánh DA5, bạn nên so sánh số chu kỳ của tín hiệu ở đầu vào và xung ở đầu ra. Các ngưỡng kích hoạt được đặt bằng lựa chọn điện trở R19 và R23. Điều khiển đầu tiên của cảm biến, đặc biệt được thiết kế để hoạt động trên một đối tượng hoạt động lâu dài và không ngừng nghỉ, nên được thực hiện ngay sau khi lắp đặt. Trong trường hợp này, ngay lập tức sẽ trở nên rõ ràng liệu tất cả các yêu cầu có được đáp ứng hay không (độ không phẳng và độ nhám cho phép của bề mặt tựa, mômen siết của ren, không bị nhiễm bẩn, v.v.). Sự vi phạm của họ có thể làm giảm tần số của SD đến mức tín hiệu cảm biến sẽ không phản ánh chính xác bản chất của rung động. Do đó, có thể tạo ra một lệnh sai để dừng khẩn cấp đối tượng. Kết quả thu được (đếm tần số của SD và vị trí của công tắc SA2) được ghi lại, nó sẽ là cơ sở để đánh giá trạng thái của cảm biến trong các chu kỳ điều khiển tiếp theo. Độ lệch quan sát được sẽ là cơ sở để nghiên cứu chi tiết hơn về tình trạng của cảm biến và đưa ra quyết định cần sửa chữa hoặc thay thế nó. Điều này ngụ ý rằng việc kiểm soát được thực hiện trên một thiết bị dừng. Nhiệt độ của nó không nhất thiết phải không đổi, và hiệu ứng được sử dụng rất nhạy cảm với sự thay đổi của nó. Như đã đề cập ở trên, ở cả hai giai đoạn của quá trình kích thích dao động, các phản ứng đối với hành động được xác định bởi giá trị của môđun áp điện - đặc tính của vật liệu chuyển đổi, phụ thuộc vào mức độ trật tự của cấu trúc vi mô của nó, mà giá trị này giảm dần. với nhiệt độ ngày càng tăng. Trong trường hợp này, biên độ của tín hiệu điện tỷ lệ với bình phương của môđun áp điện và sự phụ thuộc vào nhiệt độ của nó tương ứng mạnh hơn. Theo thử nghiệm, tín hiệu của cảm biến có nhiệt độ hoạt động tối đa 250 ° C trong quá trình điều khiển ở nhiệt độ lên đến 120 ° C có độ không ổn định trong khoảng ± 6%. Do đó, điều mong muốn là trong tất cả các chu kỳ kiểm soát, sự chênh lệch nhiệt độ không vượt quá 20 ° C. Về vấn đề này, tốt hơn là bạn nên vận hành thiết bị kết hợp với thiết bị cho phép bạn đo nhiệt độ của cảm biến. Khả năng thực hiện kiểm soát đối với đơn vị vận hành phụ thuộc vào một số trường hợp. Chúng ta có thể nói ngay rằng nếu mức độ rung được cảm biến ghi lại trong quá trình hoạt động bình thường của đối tượng gần với giới hạn của cảm biến, thì giới hạn trên của phổ rung động sẽ tiếp cận với tần số của SD hoặc cuối cùng là nhiệt độ của cảm biến gần với mức tối đa cho phép, không thể kiểm soát được. Bạn sẽ phải thực hiện nó trong thời gian ngừng hoạt động theo kế hoạch của thiết bị, nhưng ngay cả trong trường hợp này, việc sử dụng thiết bị sẽ tiết kiệm thời gian và loại bỏ công việc cơ khí. Nếu các trường hợp được liệt kê ở trên không quá rõ ràng, cần tiến hành kiểm soát trước khi khởi động và trong quá trình vận hành cơ sở. Bằng cách so sánh các kết quả, bạn có thể đưa ra quyết định sáng suốt. Cần lưu ý rằng việc kiểm soát chỉ sử dụng các chỉ báo tích hợp của thiết bị được mô tả chỉ thực hiện một phần khả năng. Việc phân tích quang phổ hoặc các đặc điểm khác của dao động tự nhiên của cảm biến sẽ không chỉ cho phép đánh giá chính xác hơn tình trạng của nó mà còn thu được thông tin bổ sung về tình trạng của nút của đối tượng mà cảm biến được lắp đặt trên đó. Thực tế là giới hạn trên của phổ của tín hiệu cảm biến thu được trong quá trình hoạt động bình thường của nó, thường không vượt quá 1000 Hz và đôi khi còn thấp hơn. Các đứt gãy nhỏ trên vật thể ít ảnh hưởng đến bản chất của phổ dao động. Và vì quang phổ rộng hơn không thể so sánh được trong quá trình điều khiển, do đó, bằng cách phân tích nó, tất nhiên, có thể nhận thấy ngay cả những thay đổi nhỏ trong tình huống trên đối tượng, nếu chúng xảy ra gần cảm biến. Máy phân tích phổ được kết nối với đầu nối X2 thay vì máy hiện sóng (hoặc cùng với nó) và công tắc SA3 được đặt ở vị trí "Chẩn đoán". Thiết bị này không chỉ giúp phát hiện thực tế về sự thay đổi trong hệ số chuyển đổi cảm biến gây ra bởi sự thay đổi trong mô-đun áp điện mà còn có thể tính toán giá trị mới của nó. Kỹ thuật đơn giản nhất là so sánh các tín hiệu trong quá trình điều khiển kép: đầu tiên, ngay sau khi lắp đặt cảm biến, khi dữ liệu xác minh gần đây của nó là hợp lệ, sau đó là sau thời gian mà người ta có thể mong đợi những thay đổi trong các thông số của cảm biến. Trên cả hai bản ghi, bạn cần chọn N chu kỳ dao động theo cùng một cách, trong mỗi chu kỳ đó xác định dải tín hiệu (hiệu giữa giá trị lớn nhất và giá trị nhỏ nhất) và tính tổng các giá trị thu được. Nếu trong quá trình điều khiển ban đầu thu được tổng V1 và trong quá trình điều khiển lặp lại - V2, hệ số chuyển đổi tại thời điểm điều khiển lặp lại bằng
trong đó S1 là giá trị của hệ số chuyển đổi thu được trong quá trình xác minh [3]. Nó có thể được sử dụng trong việc phân tích kết quả đo cho đến lần xác minh tiêu chuẩn tiếp theo. Một ứng dụng khác của thiết bị có thể được tìm thấy trong việc chế tạo cảm biến áp điện ở công đoạn lắp ráp và điều chỉnh các thông số. Trên màn hình máy hiện sóng, bạn có thể quan sát phản ứng của cảm biến đối với các hoạt động đang diễn ra một cách rõ ràng như khi điều chỉnh bộ lọc bằng máy quét. Trong trường hợp này, có thể thu được thông tin không chỉ về tần số cộng hưởng mà còn ở một mức độ nào đó về giá trị của hệ số chuyển đổi. Chúng tôi nói thêm rằng ngoài cảm biến rung, trong một số trường hợp có thể điều khiển cảm biến xung áp điện, tuy nhiên việc điều khiển sẽ chỉ mang tính chất định tính: theo nguyên tắc "tốt - không thành công". Văn chương 1. Subbotin M. Phương pháp kích thích điện của dao động cộng hưởng của gia tốc kế áp điện và thiết bị thực hiện. Bằng sáng chế của Liên bang Nga số 2150708. - Bản tin Sáng chế, 2000, Số 16.
Tác giả: M. Subbotin, Mátxcơva; Xuất bản: radioradar.net
Khai trương đài quan sát thiên văn cao nhất thế giới
04.05.2024 Điều khiển vật thể bằng dòng không khí
04.05.2024 Chó thuần chủng ít bị bệnh hơn chó thuần chủng
03.05.2024
▪ Vòng quay của Sao Hỏa đang tăng tốc mỗi năm ▪ Sụn nhân tạo ưu việt hơn thật ▪ Máy tính tất cả trong một Dell XPS 27 ▪ Stonehenge tạo ra ảo ảnh âm thanh
▪ phần của trang web Cây trồng và cây dại. Lựa chọn bài viết ▪ Khúc côn cầu trên băng bắt nguồn từ đâu? đáp án chi tiết ▪ bài viết Máy chuyển động vĩnh cửu trên băng vĩnh cửu. Phòng thí nghiệm Khoa học Trẻ em
Trang chủ | Thư viện | bài viết | Sơ đồ trang web | Đánh giá trang web
www.diagram.com.ua |







 Để lại bình luận của bạn về bài viết này:
Để lại bình luận của bạn về bài viết này: