|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCYCLOPEDIA VỀ ĐIỆN TỬ TRUYỀN THANH VÀ KỸ THUẬT ĐIỆN Máy tính hành trình cho xe đạp điện. Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện
Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện / Nhà, hộ gia đình, sở thích Chúng tôi giới thiệu tới độc giả một máy tính hành trình dựa trên bộ vi điều khiển PIC16F876A với cảm biến dòng điện bên ngoài, được thiết kế cho xe đạp điện. Trên màn hình, nó hiển thị cả các thông số lái xe và điện áp, dòng điện, công suất và mức tiêu thụ năng lượng của pin. Thiết bị này được chế tạo trên cơ sở phần tử có thể truy cập được và dễ dàng nhân rộng. Để giám sát chế độ hoạt động của xe đạp điện, nhiều dụng cụ đo lường khác nhau được sử dụng. Các thông số điện được đo bằng máy phân tích công suất [1, 2], các thông số chuyển động được theo dõi bởi nhiều máy tính đạp xe điện tử khác nhau [3] và thậm chí cả máy đo tốc độ cơ học [4]. Thậm chí còn có những màn hình đặc biệt dành cho xe đạp điện [5], hiển thị đầy đủ các thông số cần thiết nhưng giá thành cao. Dựa trên cơ sở này, tôi đã phát triển máy tính hành trình cho xe đạp điện trên bộ vi điều khiển PIC16F876A có cảm biến dòng điện bên ngoài. Đặc điểm kỹ thuật chính
Độ phân giải hiển thị của tham số tương ứng được chỉ định trong ngoặc đơn. Máy tính hành trình hiển thị thời gian hiện tại với khoảng tăng 1 phút. Sơ đồ máy tính chuyến đi được hiển thị trong Hình. 1. Vi điều khiển DD2 (PIC16F876A-I/P) hoạt động từ bộ tạo dao động được ổn định bằng bộ cộng hưởng thạch anh ZQ2 có tần số 8 MHz. Đầu nối XP1 được cung cấp để lập trình vi điều khiển. Tôi đã kết nối bộ lập trình PICkit2 với nó. Chương trình vi điều khiển được phát triển trong môi trường đồ họa Flowcode [6].
Các phép đo điện áp và dòng điện được thực hiện bằng ADC 10 bit bên trong của bộ vi điều khiển. Khi đo điện áp, tín hiệu từ bộ chia điện áp R5R9R12 được gửi đến đầu vào analog AN0 (RA0) của vi điều khiển. Khi đo dòng điện, điện áp giảm trên cảm biến dòng điện Rш khuếch đại bộ khuếch đại hoạt động OPA241 (DA1). Từ đầu ra của op-amp, tín hiệu được khuếch đại sẽ đến đầu vào analog AN1 (RA1) của bộ vi điều khiển. Mức tăng được thiết lập bằng cách cắt bớt điện trở R13 trong mạch phản hồi Op-amp.Thay vì OPA241, hầu hết mọi op-amp Rail-to-Rail trong gói SO-8 đều có thể được sử dụng, chẳng hạn như OPA340 hoặc TS507. Chương trình tính toán công suất và mức tiêu thụ điện dựa trên các giá trị dòng điện và điện áp đo được. Một shunt đo tiêu chuẩn 75SHISV.2-0.5-15 có điện áp rơi 75 mV ở dòng điện 15 A đã được sử dụng làm cảm biến dòng điện từ xa. Để thay thế, bạn có thể sử dụng bất kỳ shunt tiêu chuẩn nào có điện trở 5... 10 mOhm hoặc loại tự chế tương tự [7]. Máy tính hành trình được cấp nguồn bằng bộ điều chỉnh điện áp tuyến tính được hình thành bởi bóng bán dẫn điều chỉnh VT1 và vi mạch TL431ID (DA2). Một mạch VD1R10C6C7 được lắp vào mạch điện giúp giảm nhiễu do động cơ điện đang chạy tạo ra. Điện trở R16 và R17 đảm bảo phân bổ điện áp đồng đều giữa các tụ C6 và C7. Điện áp đầu vào tối đa cho phép (điện áp pin) phụ thuộc vào điện áp cực thu-phát cho phép của bóng bán dẫn VT1, công suất tiêu tán cho phép của nó, chất lượng tản nhiệt và công suất giải phóng trên điện trở R19-R22. Với các phần tử ổn định được chỉ ra trong sơ đồ, điện áp của pin không được vượt quá 75 V. Tuy nhiên, thiết bị có khả năng hiển thị các giá trị lên tới 102,3 V trên đèn báo. Máy tính hành trình được chế tạo trên một bảng mạch in một mặt làm bằng sợi thủy tinh dày 1,5 mm. Bản vẽ các dây dẫn của bảng mạch in và cách sắp xếp các phần tử trên đó được thể hiện trong hình. 2 và hình. 3. Trong hình. 4 cho thấy sự xuất hiện của nó.
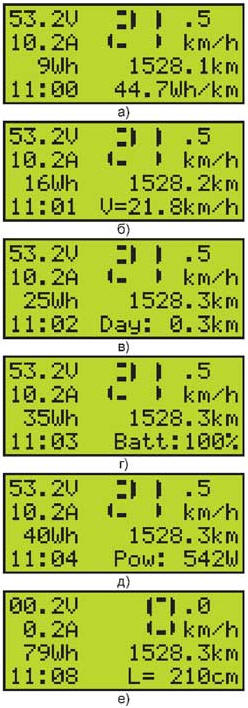
Ở mặt trước của bo mạch có bộ vi điều khiển PIC16F876A, bộ cộng hưởng thạch anh ZQ2, chip đồng hồ thời gian thực DS1307, điện trở điều chỉnh, bóng bán dẫn VT1, đầu nối XP1 (khối chốt góc PLS-5R) và khối PLS-14 để kết nối chỉ báo HG1. Phần kết nối của đầu nối, khối ổ cắm PBS-1, được hàn vào các lỗ lắp của đầu chỉ báo HG14. Pin lithium 1V G2032 CR3 được lắp vào giá đỡ BH-642. Tất cả các phần tử khác được gắn ở phía bên của dây dẫn được in. Bộ cộng hưởng thạch anh hình trụ ZQ1 (32768 Hz) được hàn vào các lỗ ở mặt bên của dây dẫn được in bên cạnh chân 1 và 2 của vi mạch DD1. Phần trên của thân nó được hàn vào một phần giấy bạc nối với một sợi dây chung. Bo mạch máy tính chuyến đi được gắn vào bảng LCD trên hai giá đỡ kim loại cao 10...12 mm bằng vít M3. Sử dụng điện trở và tụ điện có kích thước tiêu chuẩn 120b để gắn trên bề mặt. Tụ điện C6 và C7 là tantalum oxit để gắn bề mặt trong khung có kích thước E. Chúng có thể được thay thế bằng các tụ điện khác có cùng kích thước với công suất 6,8...22 μF cho điện áp 35 V. Các tụ điện còn lại có kích thước gốm 1206 hoặc 0805. Bóng bán dẫn n-p-n BD139 trong bộ ổn áp có thể được thay thế bằng một bóng bán dẫn khác có cùng cấu trúc trong gói TO-126 có điện áp cực thu-phát cho phép lớn hơn 80 V, ví dụ: BD179, MJE182 2N5192, BF469, KT817G. Một dải tấm đồng hoặc nhôm mỏng có diện tích khoảng 6 cm được đặt dưới vỏ bóng bán dẫn.2, đóng vai trò tản nhiệt. Bóng bán dẫn được cố định vào bo mạch bằng vít và đai ốc M3. Để giảm sai số đo, shunt Rш, nên được đặt càng gần cực âm của pin càng tốt. Tất cả các kết nối với máy tính hành trình có thể được thực hiện bằng các dây có tiết diện nhỏ. Để kết nối công tắc sậy SF1 (cảm biến đường dẫn), shunt R với máy tính hành trìnhш, và pin GB1, đầu nối PC7TV không hiển thị trong sơ đồ được sử dụng, lắp đặt trên vỏ máy tính chuyến đi. Công tắc sậy được lấy từ một máy tính đạp xe điện tử bị lỗi. Các thông số trong máy tính hành trình được hiển thị trên màn hình LCD bốn dòng WH1604A với điện áp nguồn 5 V không có đèn nền. Sự vắng mặt của nó được giải thích là do dòng điện cao được tiêu thụ bởi đèn nền (220 mA), điều này sẽ dẫn đến bóng bán dẫn VT1 quá nóng. Bảy thông số được hiển thị đồng thời trên màn hình LCD: điện áp, dòng điện, lượng điện tiêu thụ, thời gian hiện tại, tốc độ, tổng quãng đường và mức tiêu thụ năng lượng điện cụ thể kể từ thời điểm máy tính chuyến đi được bật (xem Hình 4). Giá trị tốc độ được hiển thị trên màn hình bằng cách sử dụng đồ họa giả. Điều này giúp có thể đưa chiều cao của chữ số lên thành hai dòng, giúp việc đọc tốc độ từ màn hình trở nên dễ dàng hơn nhiều. Máy tính hành trình được điều khiển bằng các nút SB1 “M” (đặt phút), SB2 “H” (đặt giờ) và SB3 “P” (chế độ hiển thị). Bằng cách nhấn liên tục nút SB3 ở góc dưới bên phải màn hình, thay vì mức tiêu thụ năng lượng điện cụ thể (Hình 5,a), tốc độ trung bình (Hình 5,b), quãng đường đi được hàng ngày (Hình 5,c) ), sạc pin (Hình 5,d) hoặc công suất tiêu thụ của động cơ điện (Hình 5,d).
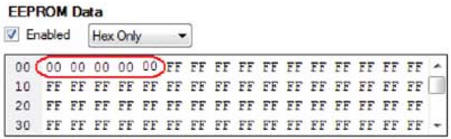
Khi bạn nhấn giữ nút SB3 trong hơn 5 giây, chương trình sẽ chuyển sang chế độ cài đặt chu vi bánh xe (Hình 5, e). Bằng cách giữ thêm nút này, chu vi bánh xe sẽ thay đổi theo từng bước 1 cm, từ 201 đến 215 cm (bánh xe 26 inch). Khi thiết bị được bật lần đầu, chu vi bánh xe được đặt thành 210 cm. 5 giây sau khi nhả nút SB3, chế độ cài đặt chu vi bánh xe sẽ thoát và giá trị cài đặt được ghi vào EEPROM của vi điều khiển. Khi lập trình bộ vi điều khiển, cần ghi số 6 vào năm ô EEPROM đầu tiên (Hình 1525,7) để đặt giá trị ban đầu của khoảng cách di chuyển về XNUMX. Nếu điều này không được thực hiện, quãng đường sẽ là XNUMX km.
Chương trình lưu lại quãng đường di chuyển trong EEPROM của vi điều khiển 3 giây sau khi xe đạp điện dừng lại. Để biểu thị thời điểm ghi, biểu tượng dấu hoa thị xuất hiện ở góc trên bên phải của màn hình LCD trong 0,3 giây. Khi tắt nguồn, chương trình sẽ đặt lại các giá trị tiêu thụ năng lượng điện cụ thể, tốc độ trung bình và quãng đường đi được hàng ngày. Để thiết lập thiết bị, thay vì pin, bạn có thể sử dụng nguồn điện trong phòng thí nghiệm có điện áp đầu ra 25...50 V và dòng tải cho phép ít nhất là 5 A. Để tương đương với tải, bạn có thể sử dụng một nguồn điện mạnh điện trở quấn dây có điện trở 5...10 Ohms. Thiết lập thiết bị theo thứ tự sau. Đầu tiên, hiệu chỉnh vôn kế của nó. Để làm điều này, điện áp được cung cấp cho thiết bị từ pin hoặc từ nguồn điện trong phòng thí nghiệm, theo dõi nó bằng vôn kế kỹ thuật số chính xác. Bằng cách thay đổi điện trở của điện trở điều chỉnh R9, các số đọc tương tự sẽ đạt được giữa vôn kế tiêu chuẩn và thiết bị được điều chỉnh. Máy đo hiện tại sau đó được hiệu chuẩn. Một ampe kế kỹ thuật số chính xác được mắc nối tiếp với tải. Bằng cách áp dụng điện áp cung cấp, thay đổi điện trở của điện trở điều chỉnh R13, các số đọc tương tự sẽ đạt được giữa ampe kế tiêu chuẩn và thiết bị được điều chỉnh. Nếu cần, việc chọn điện trở R25 sẽ đặt độ tương phản tối ưu của hình ảnh trên đèn báo. Máy tính chuyến đi có thể được lắp đặt trong bất kỳ vỏ nhựa hoặc kim loại phù hợp nào. Tệp bảng mạch máy tính Trip ở định dạng Sprint Layout 5.0 và chương trình vi điều khiển: ftp://ftp.radio.ru/pub/2016/05/tripcomp.zip. Văn chương
Tác giả: A. Nefediev
Da nhân tạo để mô phỏng cảm ứng
15.04.2024 Cát vệ sinh cho mèo Petgugu Global
15.04.2024 Sự hấp dẫn của những người đàn ông biết quan tâm
14.04.2024
▪ Nhận thức về mùi thay đổi như thế nào? ▪ Lắp ráp đồ đạc mà không cần dụng cụ ▪ Tai nghe ồn ào VS104 Max TWS
▪ Phần ăng-ten của trang web. Lựa chọn các bài viết ▪ Điều Balalaykin. biểu hiện phổ biến ▪ bài báo Nhà văn đã yêu cầu bán cuốn sách nào với giá chính xác của một chai vodka? đáp án chi tiết ▪ bài báo Echinacea purpurea. Truyền thuyết, canh tác, phương pháp áp dụng ▪ bài viết Dây dẫn thép trong anten. Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện
Trang chủ | Thư viện | bài viết | Sơ đồ trang web | Đánh giá trang web
www.diagram.com.ua |




 Để lại bình luận của bạn về bài viết này:
Để lại bình luận của bạn về bài viết này: