|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCYCLOPEDIA VỀ ĐIỆN TỬ TRUYỀN THANH VÀ KỸ THUẬT ĐIỆN Xe buýt điều khiển I2C. Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện
Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện / Máy tính I2C là giao diện hai dây được phát triển bởi Tập đoàn Philips. Yêu cầu kỹ thuật ban đầu cho giao diện có tốc độ truyền dữ liệu tối đa là 100 Kbps. Tuy nhiên, theo thời gian, các tiêu chuẩn xuất hiện cho các chế độ vận hành tốc độ cao hơn.2C. Đến một xe buýt tôi2Các thiết bị C có tốc độ truy cập khác nhau có thể được kết nối vì tốc độ truyền dữ liệu được xác định bởi tín hiệu đồng hồ. Giao thức truyền dữ liệu được thiết kế theo cách đảm bảo việc tiếp nhận dữ liệu được truyền một cách đáng tin cậy. Khi truyền dữ liệu, một thiết bị là “Master”, thiết bị này sẽ bắt đầu truyền dữ liệu và tạo tín hiệu đồng bộ hóa. Một thiết bị khác "Slave" - chỉ bắt đầu truyền khi có lệnh đến từ "Master". Bộ vi điều khiển PIC16CXXX triển khai chế độ "Slave" của thiết bị trong mô-đun SSP trong phần cứng. Chế độ "Master" được thực hiện trong phần mềm. Các thuật ngữ cơ bản được sử dụng khi mô tả hoạt động của xe buýt I2C: Hệ thống điều khiển - thiết bị truyền dữ liệu qua bus Người nhận - một thiết bị nhận dữ liệu từ xe buýt "Bậc thầy" - một thiết bị bắt đầu truyền và tạo tín hiệu đồng hồ "Nô lệ" - thiết bị được truy cập bởi "Master" Đa-"Master" - Chế độ vận hành xe buýt I2C có nhiều hơn một "Master" Trọng tài - một quy trình để đảm bảo rằng chỉ có một "Master" điều khiển xe buýt Đồng bộ hóa - quy trình đồng bộ hóa tín hiệu đồng hồ từ hai hoặc nhiều thiết bị Các giai đoạn đầu ra của bộ tạo tín hiệu đồng bộ (SCL) và dữ liệu (SDA) phải được thực hiện theo mạch thu mở (cống) để kết hợp nhiều đầu ra và kết nối qua điện trở bên ngoài với nguồn điện dương để mức bus là “ 1” khi không thiết bị nào không tạo ra tín hiệu “0”. Tải điện dung tối đa được giới hạn ở điện dung 400 pF. Khởi tạo và hoàn tất truyền dữ liệu Khi không có truyền dữ liệu trên bus, tín hiệu SCL và SDA được giữ ở mức cao nhờ có điện trở bên ngoài. Tín hiệu START và STOP được tạo bởi "Master" để xác định thời điểm bắt đầu và kết thúc truyền dữ liệu tương ứng. Tín hiệu START được tạo ra bằng cách chuyển tín hiệu SDA từ mức cao xuống mức thấp khi tín hiệu SCL ở mức cao. Tín hiệu STOP được định nghĩa là SDA chuyển từ thấp lên cao khi SCL ở mức cao. Như vậy, khi truyền dữ liệu, tín hiệu SDA chỉ có thể thay đổi khi tín hiệu SCL ở mức thấp.
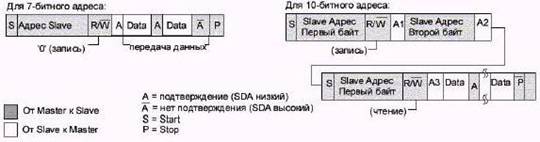
Định địa chỉ các thiết bị trên bus I2C Có hai định dạng địa chỉ được sử dụng để đánh địa chỉ các thiết bị: Định dạng 7 bit đơn giản với bit đọc/ghi R/W;
và định dạng 10 bit - byte đầu tiên chứa hai bit quan trọng nhất của địa chỉ và bit ghi/đọc, byte thứ hai chứa phần thứ tự thấp của địa chỉ.
Xác nhận chấp nhận Khi truyền dữ liệu, sau mỗi byte được truyền đi, bên nhận phải xác nhận đã nhận byte bằng tín hiệu ACK. Nếu "Slave" không xác nhận đã nhận được địa chỉ hoặc byte dữ liệu, "Master" phải ngắt quá trình truyền bằng cách tạo tín hiệu STOP. Khi truyền dữ liệu từ "Slave" đến "Master", "Master" sẽ tạo ra tín hiệu xác nhận dữ liệu ACK. Nếu "Master" không xác nhận việc nhận byte, "Slave" sẽ dừng truyền dữ liệu bằng cách "giải phóng" đường SDA. Sau đó, "Master" có thể tạo tín hiệu STOP. Để trì hoãn việc truyền dữ liệu, "Slave" có thể đặt mức logic 0, báo hiệu cho "Master" chờ. Sau khi dòng SCL được giải phóng, quá trình truyền dữ liệu vẫn tiếp tục.
Chuyển dữ liệu từ "Master" sang "Slave"
Đọc dữ liệu từ "Slave"
Sử dụng tín hiệu RE-Start để truy cập vào "Slave"
Chế độ đa "Chính" Giao thức truyền dữ liệu I2C cho phép bạn có nhiều hơn một "Master" trên xe buýt. Chức năng phân xử và đồng bộ hóa được sử dụng để giải quyết xung đột bus trong quá trình khởi tạo truyền. Trọng tài Việc phân xử được thực hiện trên đường SDA khi đường SCL ở mức cao. Thiết bị tạo ra mức cao trên đường SDA khi một thiết bị khác truyền mức thấp sẽ mất quyền lấy “Master” và phải chuyển sang chế độ “Slave”. “Master” mất quyền chủ động trên bus có thể tạo ra các xung đồng hồ cho đến hết byte mà nó đã mất thuộc tính master.
Đồng bộ hóa Đồng bộ hóa trên bus xảy ra sau khi việc phân xử được thực hiện trên tín hiệu SCL. Khi tín hiệu SCL chuyển từ mức cao xuống mức thấp, tất cả các thiết bị quan tâm sẽ bắt đầu đếm khoảng thời gian ở mức thấp. Sau đó, các thiết bị bắt đầu chuyển mức SCL từ thấp lên cao theo tốc độ dữ liệu được yêu cầu. Sau khi chuyển mức từ thấp lên cao, các thiết bị liên quan sẽ đếm thời gian của mức cao. Thiết bị đầu tiên điều khiển tín hiệu SCL ở mức thấp sẽ xác định các thông số xung nhịp.
Xuất bản: cxem.net
Da nhân tạo để mô phỏng cảm ứng
15.04.2024 Cát vệ sinh cho mèo Petgugu Global
15.04.2024 Sự hấp dẫn của những người đàn ông biết quan tâm
14.04.2024
▪ Siêu âm của CrystalLive thế hệ mới của Samsung ▪ Cảm biến vi mạch nano với lớp phủ gốm ▪ MATSUSHITA ELECTRIC giới thiệu đèn lông thú
▪ phần của trang web Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện. Lựa chọn bài viết ▪ bài viết Phân loại yếu tố nguy cơ. Những điều cơ bản của cuộc sống an toàn ▪ bài báo Wormwood paniculata. Truyền thuyết, canh tác, phương pháp áp dụng ▪ Bài viết Ai đã phát minh ra máy tính. Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện
Trang chủ | Thư viện | bài viết | Sơ đồ trang web | Đánh giá trang web
www.diagram.com.ua |










 Để lại bình luận của bạn về bài viết này:
Để lại bình luận của bạn về bài viết này: