Xe buýt CAN trong ô tô hiện đại. Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện

Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện / Ô tô. Các thiết bị điện tử
 Bình luận bài viết
Bình luận bài viết
Các thiết bị điện tử trên xe hơi hiện đại bao gồm một số lượng lớn các thiết bị điều hành và điều khiển. Chúng bao gồm tất cả các loại cảm biến, bộ điều khiển, v.v.
Cần phải có một mạng lưới liên lạc đáng tin cậy để trao đổi thông tin giữa chúng.
Vào giữa những năm 80 của thế kỷ trước, BOSCH đã đề xuất một khái niệm mới cho giao diện mạng CAN (Controller Area Network).
Bus CAN cung cấp kết nối của bất kỳ thiết bị nào có thể đồng thời nhận và truyền thông tin kỹ thuật số (hệ thống song công). Bản thân xe buýt là một cặp xoắn. Việc thực hiện này của xe buýt có thể làm giảm ảnh hưởng của các trường điện từ bên ngoài phát sinh từ hoạt động của động cơ và các hệ thống xe khác. Một bus như vậy cung cấp tốc độ truyền dữ liệu đủ cao.
Theo quy định, dây CAN bus có màu cam, đôi khi chúng được phân biệt bằng các sọc màu khác nhau (CAN-High - đen, CAN-Low - cam-nâu).
Nhờ việc sử dụng hệ thống này, một số lượng dây dẫn nhất định đã được giải phóng khỏi mạch điện của ô tô, cung cấp thông tin liên lạc, ví dụ, theo giao thức KWP 2000, giữa bộ điều khiển hệ thống quản lý động cơ và các cảnh báo tiêu chuẩn, thiết bị chẩn đoán, vân vân.
Tốc độ truyền dữ liệu trên CAN bus có thể lên đến 1 Mbps, trong khi tốc độ truyền thông tin giữa các khối điều khiển (động cơ - hệ thống truyền dẫn, ABS - hệ thống bảo mật) là 500 kbps (kênh nhanh) và tốc độ truyền thông tin của hệ thống Comfort "(bộ điều khiển túi khí, bộ điều khiển cửa xe, v.v.) của hệ thống thông tin và chỉ huy là 100 kbps (kênh chậm).
Trên hình. 1 cho thấy cấu trúc liên kết và dạng sóng của xe buýt CAN của xe khách.
Khi truyền thông tin từ bất kỳ đơn vị điều khiển nào, các tín hiệu sẽ được bộ thu phát (transceiver) khuếch đại đến mức cần thiết.
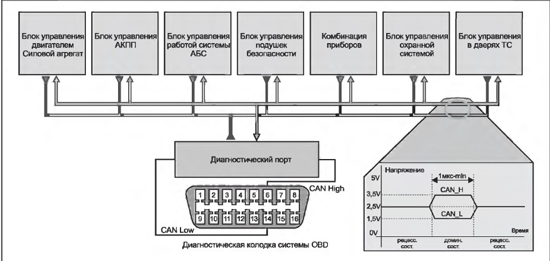
Cơm. 1. Cấu trúc liên kết và dạng sóng của CAN bus
Mỗi đơn vị được kết nối với bus CAN có một trở kháng đầu vào nhất định, dẫn đến tổng tải trên bus CAN. Tổng trở tải phụ thuộc vào số lượng thiết bị điều khiển điện tử và cơ cấu chấp hành được kết nối với bus. Vì vậy, ví dụ, điện trở của các bộ điều khiển được kết nối với bus CAN của bộ nguồn trung bình là 68 ohms, và hệ thống Comfort và hệ thống thông tin-chỉ huy - từ 2,0 đến 3,5 kOhm.
Cần lưu ý rằng khi tắt nguồn, điện trở tải của các mô-đun kết nối với bus CAN sẽ bị tắt.
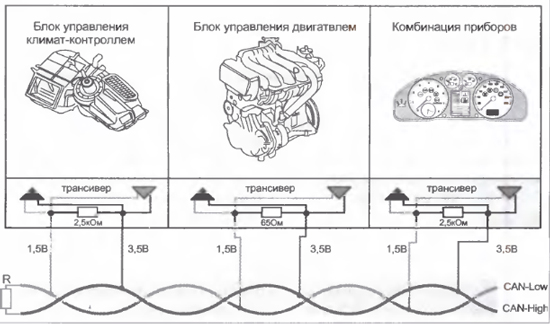
Cơm. 2. Phân mảnh của bus CAN với sự phân bố tải trong các dây CAN Cao có thể-Thấp
Trên hình. 2 cho thấy một đoạn các bus CAN với sự phân bố tải trong các dòng CAN-Cao, CAN-Thấp.
Hệ thống xe và bộ phận điều khiển không chỉ có điện trở tải khác nhau mà còn cả tốc độ truyền dữ liệu, tất cả những điều này có thể gây trở ngại cho việc xử lý các tín hiệu của các loại khác nhau.
Để giải quyết vấn đề kỹ thuật này, một bộ chuyển đổi được sử dụng để giao tiếp giữa các bus.
Bộ chuyển đổi như vậy thường được gọi là cổng kết nối, thiết bị này trên ô tô thường được tích hợp sẵn trong thiết kế của bộ phận điều khiển, cụm thiết bị và cũng có thể được chế tạo như một bộ phận riêng biệt.
Ngoài ra, giao diện được sử dụng để nhập và xuất thông tin chẩn đoán, yêu cầu của thông tin này được thực hiện thông qua dây "K" được kết nối với giao diện hoặc với cáp chẩn đoán bus CAN đặc biệt.
Trong trường hợp này, một điểm cộng lớn trong việc thực hiện công việc chẩn đoán là sự hiện diện của một đầu nối chẩn đoán thống nhất duy nhất (khối OBD).
Trên hình. 3 cho thấy một sơ đồ khối của một cổng.
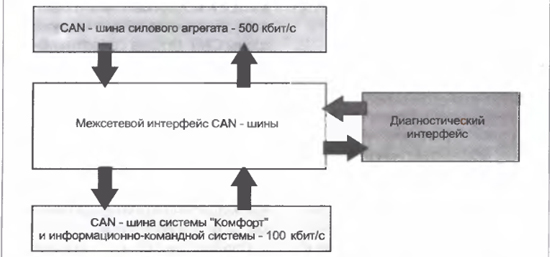
Cơm. 3. Sơ đồ khối của cổng vào
Xin lưu ý rằng trên một số thương hiệu xe hơi, ví dụ như trên Volkswagen Golf V, các xe buýt CAN của hệ thống "Comfort" và hệ thống thông tin chỉ huy không được kết nối bằng cổng.
Bảng này cho thấy các khối điện tử và các yếu tố liên quan đến các bus CAN của bộ nguồn, hệ thống Tiện nghi và hệ thống thông tin và chỉ huy. Các yếu tố và khối hiển thị trong bảng có thể khác nhau về thành phần của chúng tùy thuộc vào thương hiệu của xe hơi.
Chẩn đoán lỗi bus CAN được thực hiện bằng thiết bị chẩn đoán chuyên dụng (máy phân tích bus CAN), máy hiện sóng (bao gồm cả những thiết bị có bộ phân tích bus CHN tích hợp) và đồng hồ vạn năng kỹ thuật số.
Theo quy định, công việc kiểm tra hoạt động của bus CAN bắt đầu bằng việc đo điện trở giữa các dây bus. Cần lưu ý rằng các bus CAN của hệ thống Comfort và hệ thống thông tin và chỉ huy, không giống như bus của bộ nguồn, luôn được cung cấp năng lượng, do đó, để kiểm tra chúng, một trong các cực ắc quy phải được ngắt kết nối.
Các trục trặc chính của bus CAN chủ yếu liên quan đến ngắn mạch / hở mạch của đường dây (hoặc điện trở tải trên chúng), giảm mức tín hiệu trên bus và vi phạm logic hoạt động của nó. Trong trường hợp thứ hai, chỉ có bộ phân tích bus CAN mới có thể cung cấp tìm kiếm lỗi.
Xe buýt CÓ THỂ của một chiếc ô tô hiện đại
| Bộ nguồn CAN bus |
| Bộ điều khiển động cơ điện tử |
| Bộ điều khiển hộp số điện tử |
| Bộ điều khiển túi khí |
| Bộ điều khiển điện tử ABS |
| Bộ phận điều khiển trợ lực lái |
| Bộ điều khiển HPFP |
| Khối lắp đặt trung tâm |
| Khóa đánh lửa điện tử |
| Cảm biến góc lái |
| Xe buýt có thể thoải mái |
| Cụm công cụ |
| Khối cửa điện tử |
| Đơn vị kiểm soát đỗ xe điện tử |
| hệ thống |
| Bộ điều khiển hệ thống tiện nghi |
| Bộ phận điều khiển gạt nước |
| Giám sát áp suất lốp |
| Thông tin và lệnh CAN bus |
| hệ thống |
| Cụm công cụ |
| Hệ thống âm thanh |
| Hệ thống thông tin |
| Hệ thống định vị |
Xuất bản: radioradar.net
 Xem các bài viết khác razdela Ô tô. Các thiết bị điện tử.
Xem các bài viết khác razdela Ô tô. Các thiết bị điện tử.
Đọc và viết hữu ích bình luận về bài viết này.
<< Quay lại
 Tin tức khoa học công nghệ, điện tử mới nhất:
Tin tức khoa học công nghệ, điện tử mới nhất:
Máy tỉa hoa trong vườn
02.05.2024
Trong nền nông nghiệp hiện đại, tiến bộ công nghệ đang phát triển nhằm nâng cao hiệu quả của quá trình chăm sóc cây trồng. Máy tỉa thưa hoa Florix cải tiến đã được giới thiệu tại Ý, được thiết kế để tối ưu hóa giai đoạn thu hoạch. Công cụ này được trang bị cánh tay di động, cho phép nó dễ dàng thích ứng với nhu cầu của khu vườn. Người vận hành có thể điều chỉnh tốc độ của các dây mỏng bằng cách điều khiển chúng từ cabin máy kéo bằng cần điều khiển. Cách tiếp cận này làm tăng đáng kể hiệu quả của quá trình tỉa thưa hoa, mang lại khả năng điều chỉnh riêng cho từng điều kiện cụ thể của khu vườn, cũng như sự đa dạng và loại trái cây được trồng trong đó. Sau hai năm thử nghiệm máy Florix trên nhiều loại trái cây khác nhau, kết quả rất đáng khích lệ. Những nông dân như Filiberto Montanari, người đã sử dụng máy Florix trong vài năm, đã báo cáo rằng thời gian và công sức cần thiết để tỉa hoa đã giảm đáng kể.
... >>
Kính hiển vi hồng ngoại tiên tiến
02.05.2024
Kính hiển vi đóng vai trò quan trọng trong nghiên cứu khoa học, cho phép các nhà khoa học đi sâu vào các cấu trúc và quá trình mà mắt thường không nhìn thấy được. Tuy nhiên, các phương pháp kính hiển vi khác nhau đều có những hạn chế, trong đó có hạn chế về độ phân giải khi sử dụng dải hồng ngoại. Nhưng những thành tựu mới nhất của các nhà nghiên cứu Nhật Bản tại Đại học Tokyo đã mở ra những triển vọng mới cho việc nghiên cứu thế giới vi mô. Các nhà khoa học từ Đại học Tokyo vừa công bố một loại kính hiển vi mới sẽ cách mạng hóa khả năng của kính hiển vi hồng ngoại. Thiết bị tiên tiến này cho phép bạn nhìn thấy cấu trúc bên trong của vi khuẩn sống với độ rõ nét đáng kinh ngạc ở quy mô nanomet. Thông thường, kính hiển vi hồng ngoại trung bị hạn chế bởi độ phân giải thấp, nhưng sự phát triển mới nhất của các nhà nghiên cứu Nhật Bản đã khắc phục được những hạn chế này. Theo các nhà khoa học, kính hiển vi được phát triển cho phép tạo ra hình ảnh có độ phân giải lên tới 120 nanomet, cao gấp 30 lần độ phân giải của kính hiển vi truyền thống. ... >>
Bẫy không khí cho côn trùng
01.05.2024
Nông nghiệp là một trong những lĩnh vực quan trọng của nền kinh tế và kiểm soát dịch hại là một phần không thể thiếu trong quá trình này. Một nhóm các nhà khoa học từ Viện nghiên cứu khoai tây trung tâm-Hội đồng nghiên cứu nông nghiệp Ấn Độ (ICAR-CPRI), Shimla, đã đưa ra một giải pháp sáng tạo cho vấn đề này - bẫy không khí côn trùng chạy bằng năng lượng gió. Thiết bị này giải quyết những thiếu sót của các phương pháp kiểm soát sinh vật gây hại truyền thống bằng cách cung cấp dữ liệu về số lượng côn trùng theo thời gian thực. Bẫy được cung cấp năng lượng hoàn toàn bằng năng lượng gió, khiến nó trở thành một giải pháp thân thiện với môi trường và không cần điện. Thiết kế độc đáo của nó cho phép giám sát cả côn trùng có hại và có ích, cung cấp cái nhìn tổng quan đầy đủ về quần thể ở bất kỳ khu vực nông nghiệp nào. Kapil cho biết: “Bằng cách đánh giá các loài gây hại mục tiêu vào đúng thời điểm, chúng tôi có thể thực hiện các biện pháp cần thiết để kiểm soát cả sâu bệnh và dịch bệnh”. ... >>
| Tin tức ngẫu nhiên từ Kho lưu trữ Công cụ quang hợp cho tế bào nhân tạo
28.01.2020
Trong nỗ lực tạo ra một loại tế bào nhân tạo mới có thể bắt chước các tế bào sống, một số nhà nghiên cứu đang tập trung vào phương pháp tạo ra các tế bào nhân tạo ban đầu có chức năng sống, thay vì thay đổi vật chất di truyền của tế bào sống.
Một nhóm chuyên gia chung từ Đại học Harvard và Đại học Sogang đã quyết định đi theo con đường này, trình bày sự phát triển mới của họ về một tế bào nhân tạo có thể tái tạo hoàn toàn tất cả các chức năng và nhiệm vụ của một cơ thể sống - bao gồm quang hợp, sinh sản và hình thành bộ xương tế bào trong quá trình tăng trưởng của nó.
Trong quá trình tạo ra một tế bào nhân tạo như vậy, các chuyên gia đã có thể kích hoạt sự trao đổi chất của nó thông qua hoạt động của ánh sáng và một cấu trúc protein đặc biệt được gắn trong nó. Tuy nhiên, đây mới chỉ là bước đầu tiên trong việc xây dựng các tế bào nhân tạo thực sự phức tạp và phức tạp với các chức năng của tế bào sống, chắc chắn sẽ được ứng dụng trong nhiều lĩnh vực hoạt động khoa học của con người.
Đối với cấu trúc của một tế bào như vậy, các chuyên gia đã áp dụng phương pháp tiếp cận protein truyền thống ở đây - bằng cách kết hợp hai bộ chuyển đổi quang protein thu được từ các bào quan quang hợp của thực vật và động vật. Tiếp xúc với hoạt động của ánh sáng, các bộ chuyển đổi quang này tạo ra một gradient năng lượng nhất định, bắt đầu quá trình chuyển hóa tế bào nhân tạo.
Đồng thời, các chuyên gia đã cố gắng tạo ra một loại vi sinh vật nhân tạo thực sự ổn định bằng cách thực hiện các cấu trúc protein bổ sung và các sản phẩm tương tác hóa học - do đó, tế bào nhân tạo thu được thực sự trở thành một tế bào sống.
|
Tin tức thú vị khác:
▪ Trong 40 năm nữa, Bắc Cực sẽ mất băng
▪ kim loại mở
▪ Nam châm phức tạp hơn suy nghĩ
▪ Thuốc mỡ trị rắn cắn
▪ Các tính năng mới của mô-đun WiFi SPWF01SA.11
Nguồn cấp tin tức khoa học và công nghệ, điện tử mới
 Tài liệu thú vị của Thư viện kỹ thuật miễn phí:
Tài liệu thú vị của Thư viện kỹ thuật miễn phí:
▪ phần của trang web Máy dò kim loại. Lựa chọn bài viết
▪ bài viết Nhưng nhân tiện, anh ta sẽ đạt được một số mức độ nhất định. biểu thức phổ biến
▪ bài báo Nhà khoa học nào đã thu phí từ những người muốn có chữ ký của mình? đáp án chi tiết
▪ bài Củ cải dại. Truyền thuyết, canh tác, phương pháp áp dụng
▪ bài viết Báo cháy siêu âm. Bách khoa toàn thư về điện tử vô tuyến và kỹ thuật điện
▪ bài viết tục ngữ Tatar và những câu nói. Lựa chọn lớn
Để lại bình luận của bạn về bài viết này:
 Tất cả các ngôn ngữ của trang này
Tất cả các ngôn ngữ của trang này
Trang chủ | Thư viện | bài viết | Sơ đồ trang web | Đánh giá trang web

www.diagram.com.ua
2000-2024






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese